






Роботы научились наводить порядок в окружающей их среде
 Zakon.kz
Zakon.kz
При этом, создатели заложили в алгоритм некую толику творческого потенциала, при помощи которого роботы могут решать возникающие проблемы.
Обычно роботы очень хорошо справляются с работой и манипуляциями с объектами, которые находятся в определенном положении и в определенных местах, к примеру, на производственных конвейерах, сообщает dailytechinfo.org. Но роботам, которым предстоит в будущем действовать в различных помещениях, включая жилые помещения, на поверхности других планет и в других местах, где окружающую среду никак нельзя назвать упорядоченной. Для решения этой проблемы ученые-робототехники из университета Карнеги-Меллоун разработали программный алгоритм, руководствуясь которым роботы могут действовать и наводить порядок в среде, загроможденной различными предметами произвольной формы и размеров.
К примеру, когда человек собирается достать упаковку молока из холодильника, он не обязательно предварительно убирает все, что мешает ему сделать это. В подавляющем большинстве случаев человек рукой отодвигает другие предметы в сторону и достает из холодильника желаемую упаковку. Данный и другие подобные принципы легли в основу алгоритма, из разряда "тяни-толкай", который позволяет роботам действовать в условиях окружающего беспорядка. При этом, создатели заложили в алгоритм некую толику творческого потенциала, при помощи которого роботы могут решать возникающие проблемы.
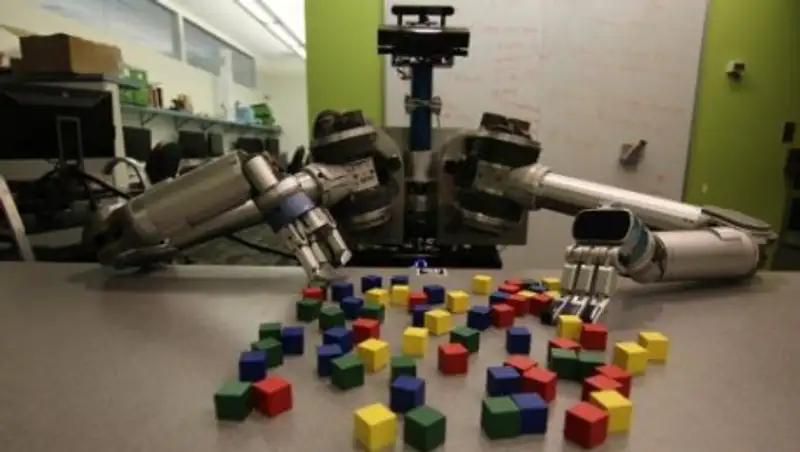
Для проверки работы нового алгоритма исследователи использовали находящегося в их распоряжении робота Home Exploring Robot Butler (HERB), который изначально предназначен для выполнения простейшей домашней работы. Только в данном случае ему была поставлена задача наведения порядка на поверхности стола, на которой были рассыпаны разноцветные кубики. "Мы были крайне удивлены проявленными роботом сверхчеловеческими способностями и антропоморфизмом, который продемонстрировал робот под управлением нового алгоритма" - рассказывает Сиддхарта Сриниваса (Siddhartha Srinivasa), профессор робототехники, - "Запястье робота имеет рабочий диапазон в 270 угловых градусов и он на полную использовал все возможности, предоставляемые этой конструктивной особенностью".
Кроме робота HERB работа нового алгоритма была использована на роботе KRex, который был разработан НАСА для движения по лунной поверхности и поверхности других планет. Под управлением нового алгоритма робот нашел подходящий путь по заполненному препятствиями участку, моделирующему участок лунной поверхности. Только в отличие от других марсо-, луно- и прочих -ходов, робот KRex сделал это не обходя все препятствия, а сдвигая в сторону некоторые из них своим корпусом и колесами.
Основу нового алгоритма составляет диспетчер, который автоматически соблюдает баланс между двумя стратегиями, вышеупомянутой стратегией "тяни-толкай" и стратегией "возьми и положи", которой руководствуются практически все промышленные роботы. Смещением баланса в сторону одной или другой стратегии действий является успех, которого достиг робот в данный момент при выполнении поставленной ему задачи, а своих действиях роботы руководствуются "пониманием" физики окружающего мира, которое заложено в него на программном уровне. Другими словами, робот всегда "понимает" к чему может привести его действие, а в будущем новый алгоритм получит дополнение, которое позволит роботу обращать особое внимание на хрупкие вещи, которые могут быть разрушены его неправильными действиями.
Поделитесь новостью
Читайте также



Следите за новостями zakon.kz в:
Если вы видите данное сообщение, значит возникли проблемы с работой системы комментариев. Возможно у вас отключен JavaScript



